'자연이 이끄는 미래 산업 - Industry of Nature'
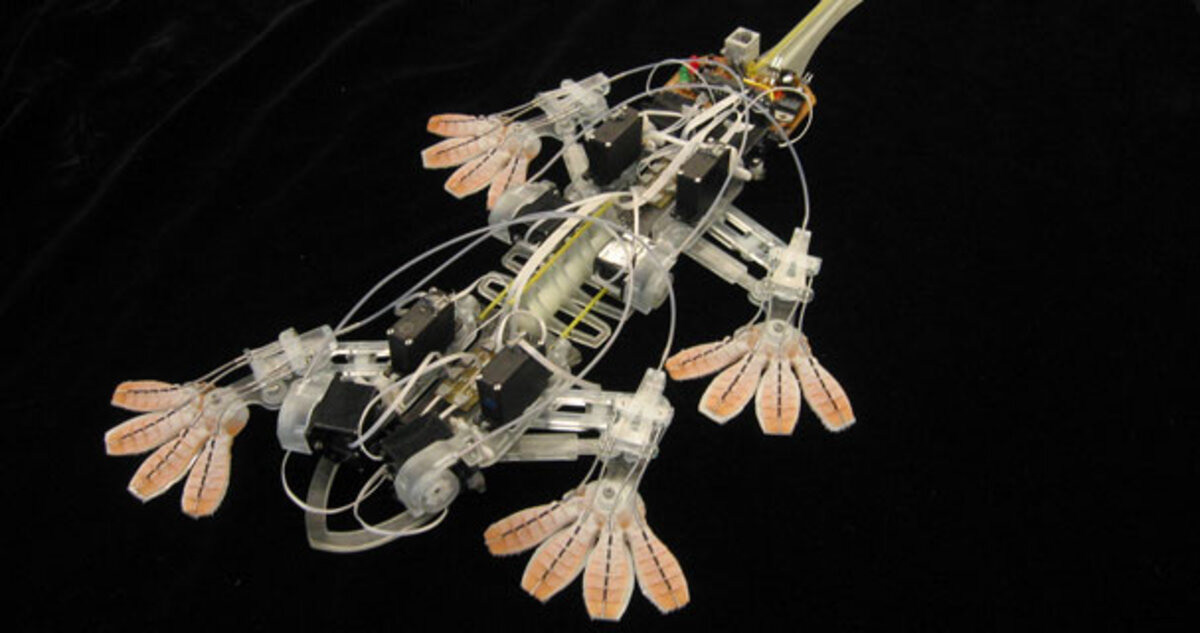
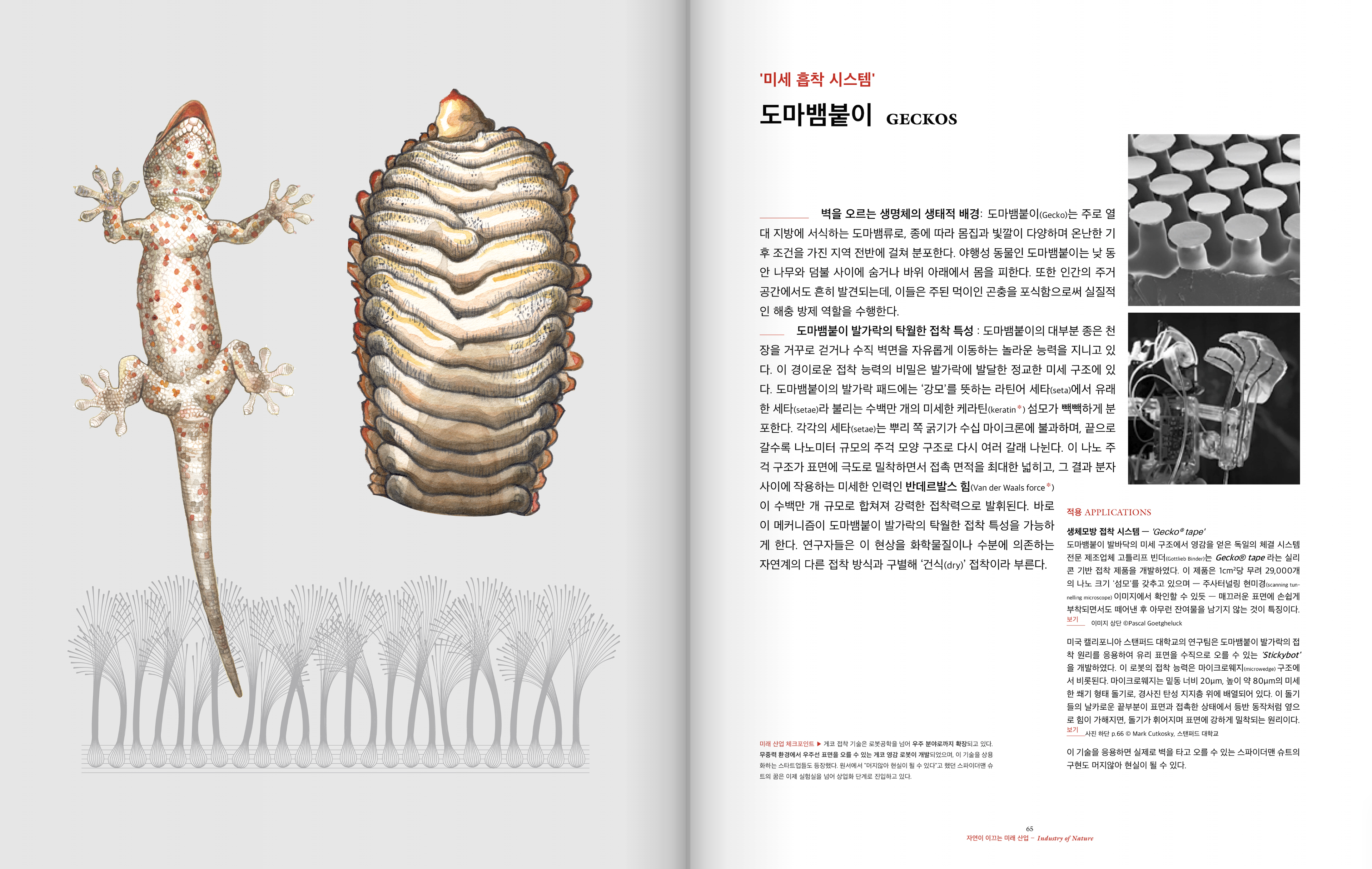
미세 흡착 시스템 - 도마뱀붙이
> 화면 클릭 확대
materiO Seoul 코멘트 :
스탠퍼드 Stickybot은 도마뱀발처럼 방향성을 가진 건식 접착패드(마이크로 웨지, DPS 등)를 발바닥에 적용해, 유리·타일·플라스틱 판 같은 매끄러운 수직면을 4 cm/s 속도로 오를 수 있는 로봇이다. Stickubot은 2000년대 중반의 연구용 프로토타입으로 건식 접착(Directional dry adhesion)과 이를 활용한 발 구조·힘 제어 전랴에 대한 소개였다. 이후 스탠퍼드·MIT 등에서는 이 방향성 접착 원리를 발전시켜 매끈하고 미끄러운 벽도 오를 수 있는 '하이브리드 클라이밍 로봇(Spinybot II)', '마이크로 터그(MicroTug)'와 같은 미세 흡착 시스템을 좀더 개발하였고, 아직 사용화 단계에서 개발은 이루어지지 않고 있다. Stickybot은 2006년경 등장해 2009년 전후로 많이 소개된 ‘도마뱀 로봇’ 시리즈의 대표 사례이고, 이후 20년 가까이 “게코형 건식 접착 로봇” 연구의 출발점으로 계속 인용되는 상태이다.